Theorem 2.5.2.
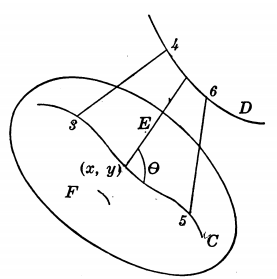
If a straight-line segment \(E_{34}\) moves so that its end-points 3 and 4 describe simultaneously two curves \(C\) and \(D\text{,}\) as shown in Figure 2.5.1, then the length \(I\) of \(E_{34}\) has the differential
\begin{equation}
dI\left(E_{34}\right)=\left.\frac{dx+p\,dy}{\sqrt{1+p^{2}}}\right|^4_{3}\tag{2.5.1}
\end{equation}
where the vertical bar indicates that the value of the preceding expression at the point 3 is to be subtracted from its value at the point 4. In this formula the differentials \(dx, dy\) at the points 3 and 4 are those belonging to \(C\) and \(D\text{,}\) while \(p\) is the slope of the segment \(E_{34}\text{.}\)
